Le Pitts de Dominique


Section Aéromodelisme Léo Lagrange

Bonjour à tous
Je vous propose ici quelques mixages pour OpenTx plus avancés que dans l’article précédent. Comme la dernière fois, on réalisera les réglages à partir du logiciel Companion.
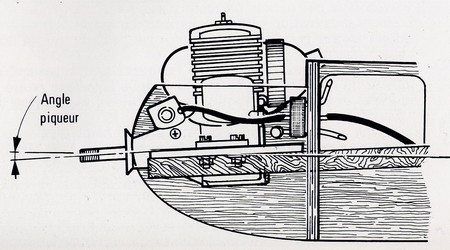
Sur un modèle motorisé, le souffle de l’hélice qui passe autour de l’aile augmente la portance de celle-ci, et l’avion à tendance à monter tout seul à plein gaz. Pour compenser ce phénomène on règle le moteur le nez vers le bas, on appelle cela l’angle piqueur. Parfois il est impossible de faire ce réglage car le moteur n’est pas réglable en angle. On peut alors utiliser un mixage qui va compenser la couple cabreur avec une action automatique à la profondeur. (bien entendu , ça peut être l’inverse, trop d’angle piqueur, et l’avion a tendance à descendre plein gaz).
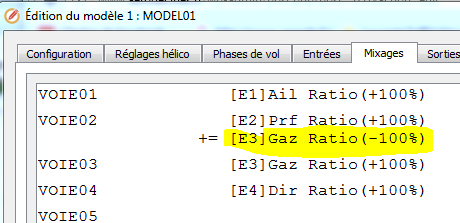
Dans OpenTX Companion, ouvrons un modèle qui rencontre ce problème, et ajoutons un mixage comme ceci sur la voie de la profondeur. On met -100 si le manche de profondeur est en +100 pour faire une action à piquer.
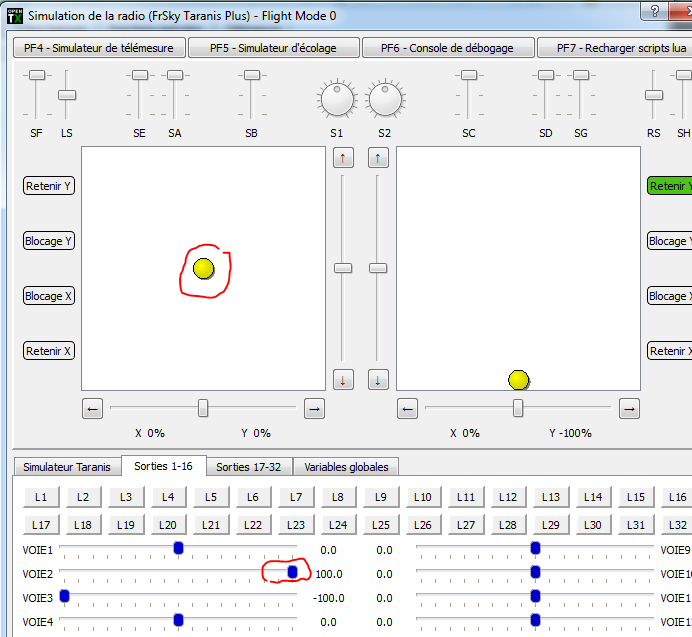
Un truc ne va pas, la profondeur n’est pas au centre quand les gaz sont à zéro. C’est normal, car zéro gaz veut dire -100 sur le manche de gaz. et donc +100 sur la profondeur par rapport au neutre.
La fonction décalage permet de décaler la sortie d’un manche pour qu’elle soit à zéro lorsqu’il est à -100, dans le contexte de notre mixage. On met une valeur de décalage égale à la valeur du ratio dans ce cas. Réduisons le ratio à -10 et le décalage à -10.
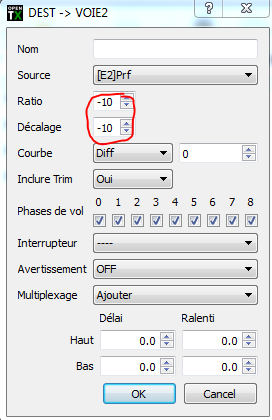
Ainsi moteur coupé, on a pas de compensation à la profondeur. En montant les gaz, on voit une légère action à piquer. -10% de ratio est une valeur trop importante, je vous recommande de faire un vol avec -1%, et diminuer de 1 en 1 tant que le phénomène cabreur n’est pas compensé. N’oubliez pas à chaque fois, de modifier le décalage pour qu’il soit égal au ratio de mixage!

Si vous faites un peu de voltige, vous avez déja tenté le vol tranche, sans doute avez-vous remarqué que l’avion donne parfois l’impression de rentrer sur le ventre ou au contraire de se cabrer côté cockpit. C’est que la dérive, très utilisée dans le vol tranche, a un effet aérodynamique induit sur la profondeur (cabreur ou piqueur selon le modèle). Un petit mixage peut arranger ça! En vol horizontal en palier à mi-gaz, l’avion bien à plat, donnez un coup de dérive de n’importe quel côté. Si l’avion monte, il faudra mixer une compensation à piquer, sinon le contraire. Notez bien le sens de la compensation que vous voulez et atterrissez.
On va créer un mixage du manche de direction sur la voie de la profondeur en multiplexage=ajout.
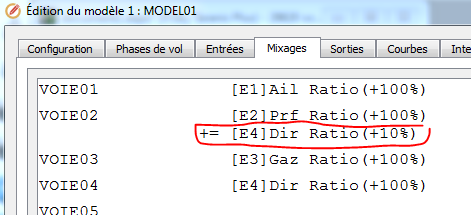
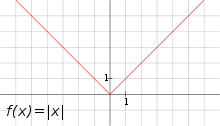
Oui mais la dérive compense la profondeur dans le bon sens seulement d’un côté, c’est normal. On va utiliser une astuce pour appliquer la compensation du manche de dérive sans son signe. Il s’agit en math de la fonction valeur absolue, et c’est prévu dans OpenTx !
Cela veut dire que quand le manche parcourt sa course de -100 à 100, la valeur de sortie sera la position du manche, mais toujours positive.(au signe du ratio près).
Modifiez le mixage du manche de direction en prenant ces paramètres.
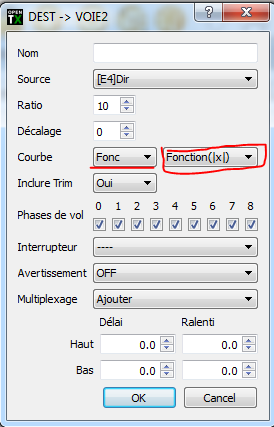
C’est le signe du ratio qui déterminera si la compensation est à piquer ou à cabrer. Pour la valeur du ratio, quelques pourcents doivent suffire. Vous constaterez vite que le vol tranche est bien plus facile!
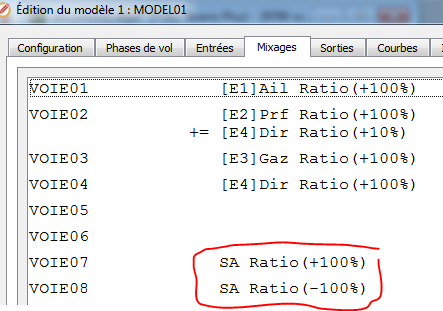
Le célèbre FunCub possède 2 ailerons et 2 volets optionnels. Je recommande de les monter , car le vol est bien plus amusant avec les volets. Vous aurez besoin alors de 8 voies si vous utilisez le crochet de largage. 5 servos dans l’aile + 2 servos dans le fuselage + les gaz= 8. Voici le mixage:
d’abord on veut les volets sur un inter à 3 positions. En haut , volets rentrés. Au milieu, volets a 45°, en bas, volets tout sortis à 90° ou presque.

On va faire un mixage unique en prenant comme source l’interrupteur lui-même. OpenTX considère automatiquement que les 3 positions interrupteur sont -100, 0, 100. On pourra affiner ensuite la position intermédiaire. Ca implique qu’il faut monter les servos de volets avec le neutre comme des ailerons. C’est à dire bien perpendiculaire au plan inférieur de l’aile. le neutre du servo correspondra au volet sorti à moitié. Sur la voie d’un volet, créez d’abord ce mixage, en choisissant votre interrupteur 3 positions préféré.
Dupliquez ce mixage sur l’autre volet, mais en mettant un ratio de -100. Vérifiez que les volets vont dans le bons sens, et calez les fins de courses au besoin, pour ne pas que les servos « grognent ».
Vous avez des volets fonctionnels à ce stade, mais il serait intéressant que les volets servent aussi en ailerons, seulement ils ne fonctionnent que vers le bas. Quand on veut aller à droite, l’aileron gauche se baisse et on voudrait qu’alors le volet gauche se baisse aussi, mais que le volet droit reste tel qu’il est.
On va utiliser les fonctions x<0 et x>0, ce sont des conditions, si le manche a une valeur x<0 , alors la sortie manche et est = à la valeur du manche, sinon c’est toujours 0.(et inversement pour x>0). On ajoute donc nos mixages comme ceci pour les deux voies de volets.

Le manche d’aileron n’agit sur un volet, que quand il est pointé à l’opposée de celui-ci ! Le mouvement du volet ne se fait que vers le bas. Quand les volets sont déployés à fond, l’écretage à 100% fait que le manche d’aileron n’agit pas dessus.
Avec 50% d’aileron en plus , le Funcub peut virevolter bien plus sauvagement !
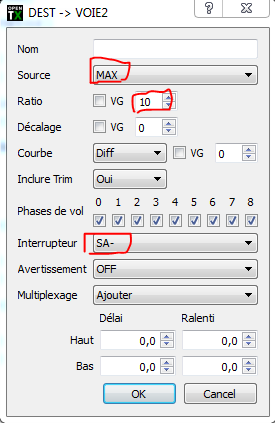
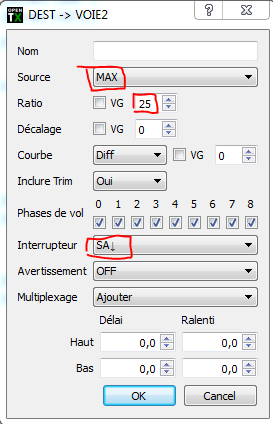
Mais un nouveau problème va apparaître, le déploiement des volets induit un phénomène cabreur à l’avion, il faut ajouter un mixage à la voie profondeur, pour que le funcub continue en palier en configuration tout sorti. Cela arrive avec deux niveaux d’intensité: quand les volets sont a moitié sortis, et quand ils sont à fond. On va ajouter deux mixages. La source configurée sur MAX signifie que c’est la valeur fixe du ratio qui sera appliquée si la condition est vraie, sinon 0. Si l’interrupteur est sur la position centrale (SA-), alors c’est +10 qui sera ajouté à piquer à la voie profondeur. Sur le deuxième mixage, on associe une valeur plus importante +25 pour la position volet à fond. Ces deux mixages ne s’ajoutent pas entre eux , ils sont mutuellement exclusif car l’inter est soit au milieu soit en bas. Quand il est en haut, aucune condition n’est vraie, rien n’est appliqué en plus sur la voie. Adaptez en vol la valeur des deux ratios en testant les volets.
J’espère que ces quelques idées de réglages vous permettrons d’optimiser le vol de votre Funcub pour la prochaine coupe !
OpenTX permet de gérer le mouvement des trappes de trains avec quelques astuces, et de se passer d’un séquenceur programmé ! Vous aurez besoin de 2 voies pour faire cela. Une pour le servo de trappe, l’autre pour le train.

Séquence ouverture: la trappe s’ouvre, le train sort, la trappe se referme
Séquence fermeture: la trappe s’ouvre, le train rentre, la trappe se referme.
…Et le tout déclenché sur un seul interrupteur…possible? Oui !
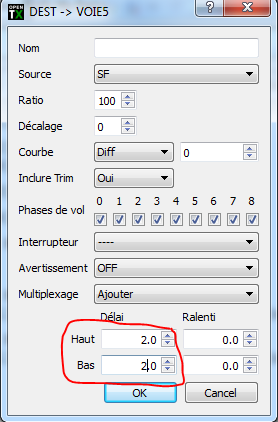
D’abord le train: mixage inter sur une voie, mais avec une tempo, afin de laisser le temps à la trappe de s’ouvrir. On ne peut pas le faire par une fonction spéciale, mais un mixage classique, sur un inter. La tempo peut être différente à la rentrée et à la sortie. Probablement qu’il faudra attendre plus longtemps quand le train s’ouvre (la trappe est alors plus près du train). Prenez un inter deux positions, c’est plus commode. Le délai indiqué est approximativement en seconde.
Ensuite la trappe: finalement on veut que quelque soit la position de l’inter, la trappe soit fermée à la fin du mouvement. On veut juste qu’elle s’ouvre assez longtemps pour laisser le train manoeuvrer quand on touche à l’inter. Réglez tout d’abord les fins de course du servo de trappe sur le modèle, pour ne pas qu’il force dans les 2 positions.
On va utiliser une courbe en plateau , et on va ralentir le parcours de cette courbe pour laisser le temps à la roue de sortir et rentrer. Dans l’onglet courbe, créer un type de courbe à 9 points et déplacez avec la souris les points comme ceci, puis faites OK.
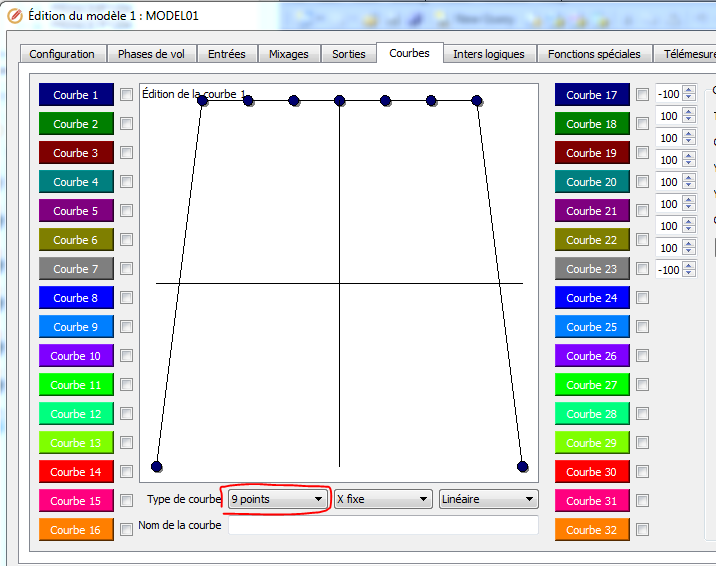
On voit qu’à chaque extrémité de la courbe, le servo de trappe est dans la même position (fermée), partout ailleurs, le servo est ouvert. Sur la voie du servo de trappe, entrez ce mixage. La source est le même inter que celui du train (et donc -100 ou 100). Le ralenti est approximativement le temps en seconde pour aller d’un côté à l’autre de la courbe.
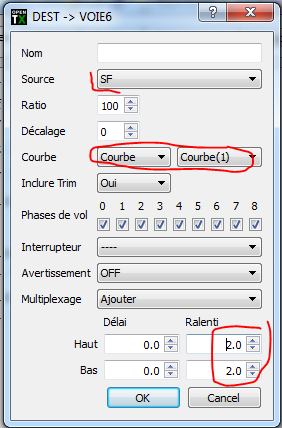
Lancez la simulation, et règlez les délais et ralentis pour que la voie de la trappe « laisse passer » la voie du train. Pour faire les tests en réel, je vous recommande de placer les 2 éléments éloignés pour ne pas tout coincer! 🙂 Voila! vous avez fait l’économie d’un séquenceur.
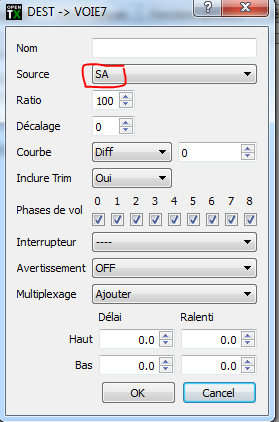
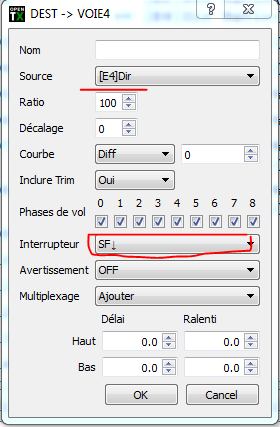
Finalement, imaginons que ce train soit la roue avant, et qu’un servo dédié existe pour faire tourner cette roue en direction. Quand le train est rentré, on ne veut pas que la roue tourne avec le manche de dérive. Mais au sol on veut pouvoir taxier. Il suffit de mettre l’interrupteur du train sur le mixage de ce servo. Il va servir de condition de fonctionnement. Quand le train est rentré, la roue ne bougera plus avec le manche de dérive.
Et voila, en espérant que ces quelques exemples vous soient utiles.
Dans le prochain article , je vous montrerai les fonctions d’écolage, une Taranis en mode joystick, et un peu de télémétrie…

